Cross Product
\[\vec{A} \times \vec{B} = - \vec{B} \times \vec{A} \\\\ \left| \vec{A} \right| \left| \vec{B} \right| sin \theta \vec{N}\]A 외적 B는 A에서 B로 감았을 때 각도 \(\theta\)의 sin을 그 크기에 곱함.
N의 방향은 A에서 B로 오른손으로 감았을 때 엄지손가락이 향하는 방향.
외적의 크기는 A와 B가 이루는 평행사변형의 넓이.
대수적 표현
\[\left| \begin{bmatrix} \vec{i} & \vec{j} & \vec{k} \\ \vec{a_1} & \vec{a_2} & \vec{a_3} \\ \vec{b_1} & \vec{b_2} & \vec{b_3} \end{bmatrix} \right|\]삼중적
\[\left| \vec{C} \cdot (\vec{A} \times \vec{B}) \right|\]벡터의 미적분
미분
\[\vec{r}(t)=< x(t),y(t),z(t)>\] \[\vec{r}'(t)=< x'(t),y'(t),z'(t)>\]단위벡터함수의 미분
\[T(t) \perp T'(t)\]다른건 다 똑같은데, 단위벡터함수를 미분한 것과 단위벡터는 서로 수직이다.
이는 단위벡터의 변화가 수직성분으로만 발생하기 때문.
적분
부정적분은 각각 역연산.
정적분은 구간에 대해 각각 적분.
사실상 똑같다.
곡률
\[C: \vec{r(t)}, t \in (a,b)\]\(\vec{r}'(t), \vec{r}''(t)\): 정의
\(r(t)\)에서 \(C\)의 곡률을 \(k(t)\)라고 하면,
\[k(t)=\frac{\left| \vec{r}'(t) \times \vec{r}''(t) \right|}{\left|\vec{r}'(t)\right|^3}\]곡률은 그 곡선을 지나가는 속도는 상관이 없다.
원의 곡률은 1/r, 즉 반지름과 반비례한다.
편미분
편도함수
다음과 같이 표기
\[f_x\] \[f_y\]이렇게 아래첨자로 넣는다.
고계도의 경우
\[f_{xx}\] \[f_{xy}\]클레로의 정리
둘 다 연속함수라면
\[f_{xy}=f_{yx}\]연쇄법칙
\[z=f(x,y), x=x(t), y=y(t)\] \[\frac{dz}{dt}=?\]z -> x -> t 로의 경로와 z -> y -> t 로의 경로를 둘다 생각해야한다.
\[\frac{dz}{dt}=\frac{\partial z}{\partial x} \frac{dx}{dt}+\frac{\partial z}{\partial y} \frac{dy}{dt}\]전미분.
\[z=f(x,y), x=x(s,t), y=y(s,t)\] \[\frac{dz}{ds}=?\] \[\frac{dz}{dt}=?\]z -> x -> s,t 그리고 z -> y -> s,t
\[\frac{dz}{ds}=\frac{\partial z}{\partial x} \frac{dx}{ds}+\frac{\partial z}{\partial y} \frac{dy}{ds}\] \[\frac{dz}{dt}=\frac{\partial z}{\partial x} \frac{dx}{dt}+\frac{\partial z}{\partial y} \frac{dy}{dt}\]3개든 4개든 마찬가지.
방향도함수
\[z=f(x,y), \vec{u}=<a,b>\]\(\vec{u}\)가 단위벡터일 때, \(\sqrt{a^2+b^2}=1\)
f의 u방향으로의 (x,y)에서의 방향도함수는,
\[D_{\vec{u}} f(x,y)=lim_{h \rightarrow 0} \frac{f((x,y)+h(u))-f(x,y)}{h} \\\\ =lim_{h \rightarrow 0} \frac{f((x,y)+h(x,y))-f(x,y)}{h} \\\\ =lim_{h \rightarrow 0} \frac{f(x+ha,y+hb)-f(x,y)}{h}\]u에 따라 값이 다르다.
편도함수를 통한 방향도함수 계산
z가 x,y에 관한 편도함수를 가지면,
\[D_{\vec{u}} f(x,y) = f_x(x,y)a + f_y(x,y)b\]이는 연쇄법칙으로 x,y각각에 대해 편미분한 것을 가지고 계산함.
Gradient vector
\[\nabla f(x,y)= < f_x(x,y), f_y(x,y) >\]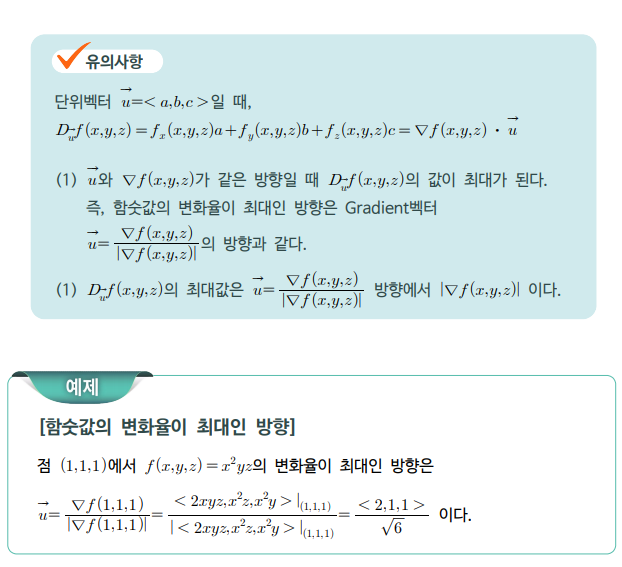
극대 극소
페르마정리
편미분가능함수 z=f(x,y)가 정의역의 점 (a,b)에서 극값을 가지면,
\(f_x(a,b)=f_y(a,b)=0\)이다.
역은 성립 x
이계도로 살펴보아야함.
Hessian matrix
2계도함수의 행렬식임.
임계점 (a,b)에 대해
\[D(a,b)= \begin{vmatrix} f_{xx}(a,b) & f_{xy}(a,b) \\ f_{yx}(a,b) & f_{yy}(a,b) \end{vmatrix}\]- D(a,b)>0, \(f_{xx}(a,b)>0\)이면 f(a,b)는 극소, PD
- D(a,b)>0, \(f_{xx}(a,b)<0\)이면 f(a,b)는 극대, ND
- D(a,b)<0, (a,b)는 안장점(indefinite)
- D(a,b)=0, indefinite
중적분
중적분은 리만적분의 개념에서 출발함.
편적분
어떤 영역에서 x를 고정하여 dy로 적분하는것.
같은 영역에서 y를 고정하여 dx로 적분하는것.
반복적분
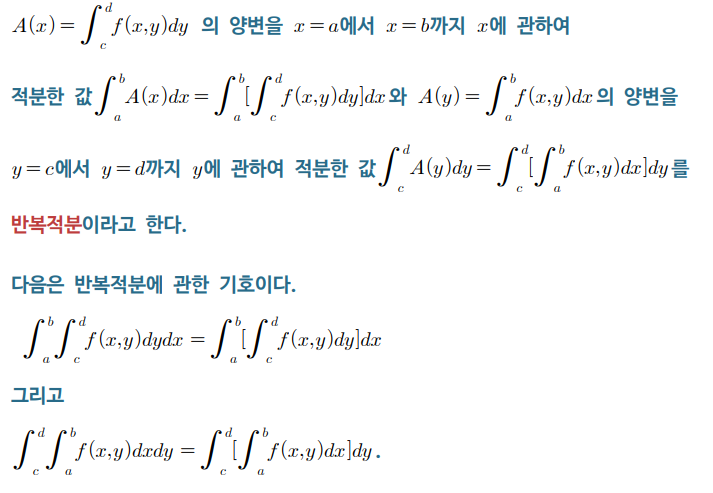
편적분 한것을 겹치는것.
Fubini’s Theorem
연속함수의 경우 반복적분을 통해 직사각형, 큐브, n차 정다면체 영역에 대한 중적분을 계산할 수 있다.
연속함수라면 반복적분의 적분 순서는 관계없이 적분 값은 동일하다.
그러나 계산상의 이점을 위해서 적분 순서는 중요하다.
일반영역에서의 적분
생각하기 조금 까다롭긴 하지만 적분 대상과 구간을 잘 파악하면 일반영역에서도 반복적분할 수 있다.
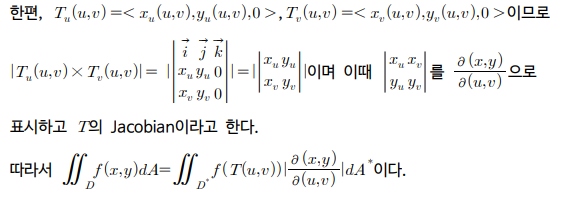
변수변환
변수 변환을 통해 함수와 적분 영역을 변환하는것이다.
이 때 domain이 1:1 대응되어야한다.
\[T: D^* \rightarrow D\] \[T(u,v) = < x(u,v),y(u,v) >\]직사각형으로 잘게 쪼개어 변환하므로 스케일링 팩터가 곱해진다.
\[\int \int_{D} f(x,y)dA=\int \int_{D^*} f(T(u,v)) \left|T_u(u,v) \times T_v(u,v) \right| dudv\]위의 식이 역 \(D\)에서 영역 \(D^*\) 적분으로 변환.
1:1 대응, 스케일링, 변환을 잘 설정하면 적분영역을 극좌표계의 구에서 정육면체로 옮기는것도 가능하다.
Jacobian
Lagrange Multiplier
khan academy - Lagrange multipliers
khan academy - Lagrange multipliers(article)
Constrained Optimization이다.
Maximize \(f(x,y)= x^2 y\)
on the set \(x^2+y^2=1\), which is unit circle
\(f(x,y)=c\) 는 contour line인데, contour line이 constraints와 접해야한다.
\(g(x,y)=x^2+y^2\) 라고 할 때,
\[\nabla f = \lambda \nabla g\]인 지점을 찾는다.
\(\lambda\)는 벡터이기 때문에 방향은 같을 수 있지만 스케일이 다를 수 있는데, 스케일의 비율이다.
여기서 \(\lambda\)가 Lagrange Multiplier이다.
이 \(\lambda\)를 풀면 최적해를 찾을 수 있다!
Lagrangian
\[R(x,y)=x^2e^yy=c\](revenue function의 R)
최대값을 구하라.
\[B(x,y)=x^2+y^2=4\](Budget의 B)
\[\nabla R = \lambda \nabla B\]이걸 조금 더 깔끔하게 함수화하면,
\[\mathscr{L} (x,y,\lambda)=R(x,y)-\lambda(B(x,y)-b)\]b는 constant
\[\nabla \mathscr{L} = 0\]위를 만족하는 지점이 최적해.
\[\begin{bmatrix} \frac{\partial \mathscr{L}}{\partial x} \\ \frac{\partial \mathscr{L}}{\partial y} \\ \frac{\partial \mathscr{L}}{\partial z} \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix}\]